





抖动-示波器测量的最高境界
抖动话题是示波器测量的最高境界,也是最风云变换的一个话题,这是因为抖动是示波器测量的诸多功能中最和“数学”相关的。 玩数学似乎是需要一定境界的。
1,抖动和波形余辉的关系
有一种比较传统的测量抖动的方法,就是利用余辉来查看信号边沿的变化,然后再用光标测量变化的大小(如图1所示)。后来高端一点的示波器具有“余辉直方图”的功能,利用余辉直方图和相关参数可以自动测量出信号边沿变化的余辉的变化范围。 在上个世纪90年代初示波器有了真正意义的“测量统计”功能之后,这个方法就逐渐被淘汰了。 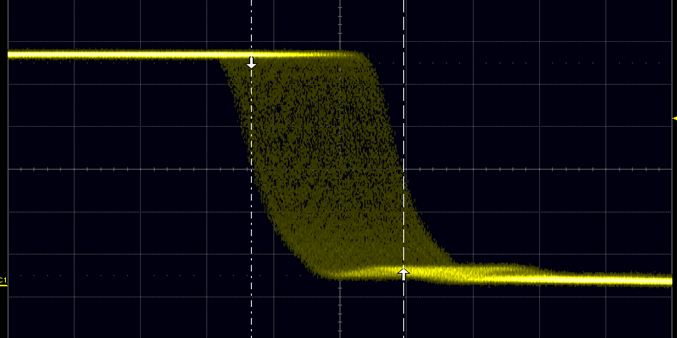
图1 传统的抖动测量方法
这种传统的方法有下面这些缺点:(1)总会引入触发抖动,因此测量的结果很不准确。(2)只能测量部分参数的抖动,譬如触发上升沿,测量下降沿的余辉变化,反应了宽度的抖动,触发上升沿,测量相邻的上升沿的余辉变化,反应了周期的抖动。显然还有很多类型的抖动特别是最重要的TIE抖动无法测量出来。 (3)抖动产生的因果关系的信息也无从得知。
2,定义抖动的四个维度
和抖动相关的名词非常多:时钟抖动,数据抖动; 周期抖动,TIE抖动,相位抖动,cycle-cycle抖动; 峰峰值抖动(pk-pk jitter),有效值抖动(rms jitter);总体抖动(Tj),随机抖动(Rj),固有抖动(Dj);周期性抖动,DCD抖动,ISI抖动,数据相关性抖动; 定时抖动,基于误码率的抖动; 水平线以上的抖动和水平线以下的抖动…… 这些名词反应了定义抖动的不同维度。
回到“什么是抖动”的定义吧。其实抖动的定义一直没有统一,这可能也是因为需要表达清楚这个概念的维度比较多的原因。目前引用得比较多的定义是: Jitter is defined as the short-term variations of a digital signal’s significant instants from their ideal positions in time. 就是说抖动是信号在电平转换时,其边沿与理想位置之间的偏移量。如图2所示,红色的是表示理想信号,实际信号的边沿和红色信号边沿之间的偏差就是抖动。什么是“理想位置”,“理想位置”是怎么得到的? 这是被问到后最不好回答的问题。 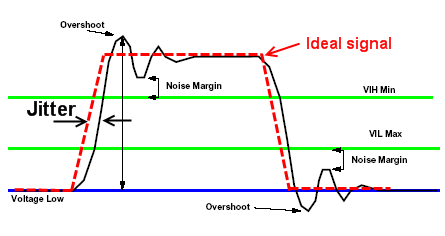
图2抖动的定义
我认为描述抖动离不开“四个维度”。仅仅是说“我想测量抖动”,这是不具体的表达。我建议的一种完整的表达方式是: 我想测量100万样本(一定数量样本)下的时钟抖动(或 数据抖动)的周期抖动(或 TIE抖动,相位抖动,cycle-cycle抖动)的峰峰值抖动和有效值抖动(或Tj,Rj,Dj)。 具体的测量方法上就是先测量被测信号的周期(或TIE,Cycle-cycle period)等参数,然后持续测量出100万个甚至更多样本,将这100万个样本下参数测量结果的最大值和最小值相减即为峰峰值抖动。但是10的12次方样本很难直接测量出来,因为需要消耗的时间太长,所以就改用数学模型预测的方法进行推导。
上面表达中涉及到抖动定义的四个维度是:
(1)测量抖动的样本数/误码率。
(2)被测信号的类型。分为时钟抖动和数据抖动。
(3)关注的抖动参数的类型。主要有周期抖动,TIE抖动,cycle-cycle抖动。
(4) 抖动测量结果的类型。主要有峰峰值抖动,有效值抖动,总体抖动(Tj),固有抖动(Dj),随机抖动(Rj)。
3,抖动是关于误码率的函数
我们下意识里可能会问,被测信号的抖动最坏能有多大? 其实,随着观察到的测量样本数的增加,这个问题的答案也就不一样。没有样本数的限定,这个问题没有一个收敛性的答案。抖动是关于误码率的函数。误码率为10e-12(10的-12次方)即表示发送端发送10e+12(10的12次方)个比特位的信号,在接收端出现误码的比特位个数是一个。测量10e-12误码率下的抖动可以理解为测量10e+12样本下的抖动。
4,时钟抖动VS数据抖动 / 水平线以上的抖动 VS 水平线以下的抖动
当我们在定义抖动具有四个维度时,特别强调被测信号的类型分为时钟抖动和数据抖动,这是否意味着两种抖动的测量方法是完全不一样的呢? 其实,我们可以将时钟信号理解为一种特别的数据。所有用于数据抖动的测量方法理论上都可以用于测量时钟,只是因为时钟信号非常简单,是规则的010101…码型,因此,对于时钟抖动通常是通过直接测量一定数量的样本(样本数量应该是多少一般也没有统一的定义,甚至在有的时钟芯片手册中也没有说明)的参数结果,统计得出参数变化大小的pk-pk值,即为峰峰值抖动(pk-pk jitter)。 峰峰值抖动随着测量时间的增加,测量结果会变大。峰峰值抖动的测量结果不具备重复性,因为随机抖动理论上是无限发散的。有效值抖动(rms jitter)表示参数变化大小的标准偏差值。 我们将这种定量方法直接测量出来的抖动形象地称为“水平线以上的抖动”,因为这种抖动结果是不需要借助数学模型进行推导和预测的。 这种方法的抖动也叫“定时抖动(Timing jitter)”。 时钟抖动关注的信号参数类型主要有周期(period),TIE(Time Interval Error)和相邻周期间(Cycle-Cycle Period),对于时钟信号的单独研究,通常三种参数的抖动都需要测量。
数据抖动关注的是一定误码率下的TIE抖动,现在的串行数据测量领域通常默认的都是10e-12误码率,也就是说需要测量10e+12样本,这需要示波器测量几个小时甚至几天的时间,即使最快的示波器也无法“硬”测量出10e+12样本的参数来作为测量结果,因此,就需要根据某种数学模型来基于当前一定数量的样本数测量的结果来“预测”10e+12的样本下的抖动结果,这种基于数学模型预测的方法测量的抖动叫“水平线以下的抖动”。所谓抖动的风云变幻即在于一直在争论使用什么样的数学模型来预测抖动是最准确的。很多抖动相关的文章就是在用一连串的数学公式来说明作者发现的一种新模型是更准确的,看得您云里来雾里去的。
5,认识TIE抖动
为什么TIE抖动是作为测量数据抖动Tj的默认参数呢? 我想里引用参考文献[1]中的介绍可以帮助我们理解TIE的重要性:
“通信系统的实质是通过一段介质发送或者接收数据。发送端TX发出不同编码形式的高速串行数据,经过一段链路传输后到达接收端RX,串行数据在传输过程中会受到各种各样的干扰,引起数据的抖动,串行数据系统工作的目的就是要尽可能的减少这些干扰的影响使得接收端能准确无误的恢复出发送端发送过来的数据。由于接收端(一般是由D触发器构成)需要使用时钟采样来完成同步接收数据,因此时钟信号和数据信号之间的同步关系是非常重要的,即必须要满足一定的建立时间和保持时间。因此串行数据时钟系统结构的变化最根本上是为了满足时钟与数据之间的时序关系,以便接收端能正确的接收到信号。当数据信号的电平发生翻转后,时钟边沿与数据边沿需要一定的建立时间来锁存数据;同时,数据信号的电平需要一定的保持时间让时钟能稳定的锁存数据。为了让建立时间和保持时间最大化,时钟最好能出现在数据比特位的中央。但是由于数据或者时钟存在抖动,抖动较大时,无法满足建立时间和保持时间的要求,D触发器可能输出错误的数据,产生误码。特别是在高速数字电路中,速率的增加导致建立时间和保持时间的余量越来越小,由于抖动产生误码的概率越来越高,所以,时钟和数据的抖动测试非常重要。
研究串行数据系统的抖动主要是研究时钟与串行数据的相对抖动,而不是单纯的指时钟抖动或者数据抖动。也就是说即使时钟有很大的抖动,但是只要数据也存在同样大的抖动,则两者之间的相对抖动仍旧很小,时钟和数据之间的建立时间和保持时间也仍旧能够得到保证。”
如何将时钟和数据之间的关系联系起来呢? TIE(Time Interval Error)! TIE为作为抖动中最重要的一个参数,我们需要对它有深刻认识。 TIE定义为被测信号边沿与“参考时钟”边沿之间的时间间隔。具体计算中是以和参考电平的交叉点的时刻来计算的,如图3所示。TIE是在信号和参考时钟的每一个边沿都进行测量。 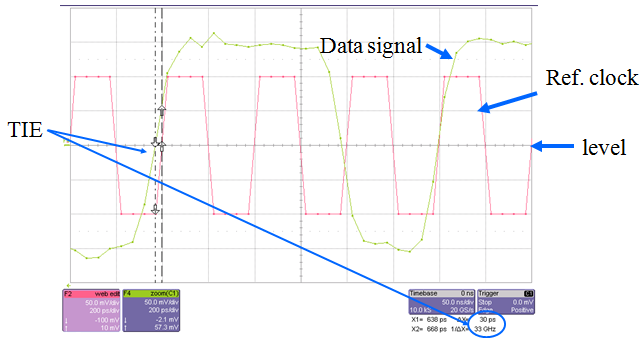
图3 TIE的定义
产生“参考时钟”(也就是前面抖动定义中提到的“理想位置”)有几种方法,比较常用的方法是从被测信号中通过软件PLL进行恢复。有时侯是直接定义一个理想的参考时钟,或者是在外部引入一个硬件时钟作为参考。 PLL的特性是准确测量抖动的关键所在,因为产生的参考时钟的误差将直接影响到TIE的测量结果,并进而影响到最终的抖动测量结果。关于PLL的具体细节请阅读参考文献[2]。
6,峰峰值抖动和总体抖动
峰峰值抖动(pk-pk jitter)是水平线以上的抖动,是直接测量出来的。总体抖动(Tj)是水平线以下的抖动,是通过数学模型预测出来的。很多时候当您说要测量Tj时,我就知道您具体要测量什么了,因为这里面有几个维度是业界的默认设置:Tj通常是指测量10的12次方样本下的数据抖动的TIE抖动的峰峰值抖动(pk-pk jitter)。前面已述,一般都默认了Tj是基于10e-12的误码率的,默认关注的抖动参数是TIE。
7,抖动和眼图的关系
眼图在一定程度上反应了抖动的大小,眼图越“干净”,眼图展开程度越大,说明抖动值越小。眼图的交叉位置在水平轴的区间越小,抖动越小。 在光模块行业,过去常通过眼图交叉点位置形成的余辉直方图来直接测量抖动,余辉直方图的最左到最右边的大小范围即为峰峰值抖动,如图4所示。在HDMI测量规范中对抖动的定义中也是采用这种方法。按前面所述,这是一种水平线以上的抖动。 交叉点的余辉直方图呈现高斯分布,说明抖动的行为主要表现为随机抖动,反之,如果余辉直方图表现为双峰分布,说明有明显的固有抖动。 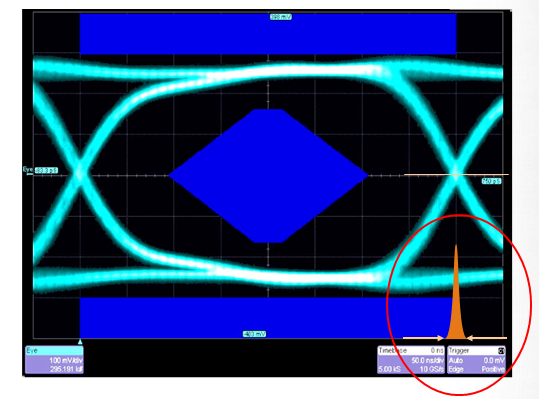
图4 抖动和眼图的关系
1,抖动和波形余辉的关系
有一种比较传统的测量抖动的方法,就是利用余辉来查看信号边沿的变化,然后再用光标测量变化的大小(如图1所示)。后来高端一点的示波器具有“余辉直方图”的功能,利用余辉直方图和相关参数可以自动测量出信号边沿变化的余辉的变化范围。 在上个世纪90年代初示波器有了真正意义的“测量统计”功能之后,这个方法就逐渐被淘汰了。
图1 传统的抖动测量方法
这种传统的方法有下面这些缺点:(1)总会引入触发抖动,因此测量的结果很不准确。(2)只能测量部分参数的抖动,譬如触发上升沿,测量下降沿的余辉变化,反应了宽度的抖动,触发上升沿,测量相邻的上升沿的余辉变化,反应了周期的抖动。显然还有很多类型的抖动特别是最重要的TIE抖动无法测量出来。 (3)抖动产生的因果关系的信息也无从得知。
2,定义抖动的四个维度
和抖动相关的名词非常多:时钟抖动,数据抖动; 周期抖动,TIE抖动,相位抖动,cycle-cycle抖动; 峰峰值抖动(pk-pk jitter),有效值抖动(rms jitter);总体抖动(Tj),随机抖动(Rj),固有抖动(Dj);周期性抖动,DCD抖动,ISI抖动,数据相关性抖动; 定时抖动,基于误码率的抖动; 水平线以上的抖动和水平线以下的抖动…… 这些名词反应了定义抖动的不同维度。
回到“什么是抖动”的定义吧。其实抖动的定义一直没有统一,这可能也是因为需要表达清楚这个概念的维度比较多的原因。目前引用得比较多的定义是: Jitter is defined as the short-term variations of a digital signal’s significant instants from their ideal positions in time. 就是说抖动是信号在电平转换时,其边沿与理想位置之间的偏移量。如图2所示,红色的是表示理想信号,实际信号的边沿和红色信号边沿之间的偏差就是抖动。什么是“理想位置”,“理想位置”是怎么得到的? 这是被问到后最不好回答的问题。
图2抖动的定义
我认为描述抖动离不开“四个维度”。仅仅是说“我想测量抖动”,这是不具体的表达。我建议的一种完整的表达方式是: 我想测量100万样本(一定数量样本)下的时钟抖动(或 数据抖动)的周期抖动(或 TIE抖动,相位抖动,cycle-cycle抖动)的峰峰值抖动和有效值抖动(或Tj,Rj,Dj)。 具体的测量方法上就是先测量被测信号的周期(或TIE,Cycle-cycle period)等参数,然后持续测量出100万个甚至更多样本,将这100万个样本下参数测量结果的最大值和最小值相减即为峰峰值抖动。但是10的12次方样本很难直接测量出来,因为需要消耗的时间太长,所以就改用数学模型预测的方法进行推导。
上面表达中涉及到抖动定义的四个维度是:
(1)测量抖动的样本数/误码率。
(2)被测信号的类型。分为时钟抖动和数据抖动。
(3)关注的抖动参数的类型。主要有周期抖动,TIE抖动,cycle-cycle抖动。
(4) 抖动测量结果的类型。主要有峰峰值抖动,有效值抖动,总体抖动(Tj),固有抖动(Dj),随机抖动(Rj)。
3,抖动是关于误码率的函数
我们下意识里可能会问,被测信号的抖动最坏能有多大? 其实,随着观察到的测量样本数的增加,这个问题的答案也就不一样。没有样本数的限定,这个问题没有一个收敛性的答案。抖动是关于误码率的函数。误码率为10e-12(10的-12次方)即表示发送端发送10e+12(10的12次方)个比特位的信号,在接收端出现误码的比特位个数是一个。测量10e-12误码率下的抖动可以理解为测量10e+12样本下的抖动。
4,时钟抖动VS数据抖动 / 水平线以上的抖动 VS 水平线以下的抖动
当我们在定义抖动具有四个维度时,特别强调被测信号的类型分为时钟抖动和数据抖动,这是否意味着两种抖动的测量方法是完全不一样的呢? 其实,我们可以将时钟信号理解为一种特别的数据。所有用于数据抖动的测量方法理论上都可以用于测量时钟,只是因为时钟信号非常简单,是规则的010101…码型,因此,对于时钟抖动通常是通过直接测量一定数量的样本(样本数量应该是多少一般也没有统一的定义,甚至在有的时钟芯片手册中也没有说明)的参数结果,统计得出参数变化大小的pk-pk值,即为峰峰值抖动(pk-pk jitter)。 峰峰值抖动随着测量时间的增加,测量结果会变大。峰峰值抖动的测量结果不具备重复性,因为随机抖动理论上是无限发散的。有效值抖动(rms jitter)表示参数变化大小的标准偏差值。 我们将这种定量方法直接测量出来的抖动形象地称为“水平线以上的抖动”,因为这种抖动结果是不需要借助数学模型进行推导和预测的。 这种方法的抖动也叫“定时抖动(Timing jitter)”。 时钟抖动关注的信号参数类型主要有周期(period),TIE(Time Interval Error)和相邻周期间(Cycle-Cycle Period),对于时钟信号的单独研究,通常三种参数的抖动都需要测量。
数据抖动关注的是一定误码率下的TIE抖动,现在的串行数据测量领域通常默认的都是10e-12误码率,也就是说需要测量10e+12样本,这需要示波器测量几个小时甚至几天的时间,即使最快的示波器也无法“硬”测量出10e+12样本的参数来作为测量结果,因此,就需要根据某种数学模型来基于当前一定数量的样本数测量的结果来“预测”10e+12的样本下的抖动结果,这种基于数学模型预测的方法测量的抖动叫“水平线以下的抖动”。所谓抖动的风云变幻即在于一直在争论使用什么样的数学模型来预测抖动是最准确的。很多抖动相关的文章就是在用一连串的数学公式来说明作者发现的一种新模型是更准确的,看得您云里来雾里去的。
5,认识TIE抖动
为什么TIE抖动是作为测量数据抖动Tj的默认参数呢? 我想里引用参考文献[1]中的介绍可以帮助我们理解TIE的重要性:
“通信系统的实质是通过一段介质发送或者接收数据。发送端TX发出不同编码形式的高速串行数据,经过一段链路传输后到达接收端RX,串行数据在传输过程中会受到各种各样的干扰,引起数据的抖动,串行数据系统工作的目的就是要尽可能的减少这些干扰的影响使得接收端能准确无误的恢复出发送端发送过来的数据。由于接收端(一般是由D触发器构成)需要使用时钟采样来完成同步接收数据,因此时钟信号和数据信号之间的同步关系是非常重要的,即必须要满足一定的建立时间和保持时间。因此串行数据时钟系统结构的变化最根本上是为了满足时钟与数据之间的时序关系,以便接收端能正确的接收到信号。当数据信号的电平发生翻转后,时钟边沿与数据边沿需要一定的建立时间来锁存数据;同时,数据信号的电平需要一定的保持时间让时钟能稳定的锁存数据。为了让建立时间和保持时间最大化,时钟最好能出现在数据比特位的中央。但是由于数据或者时钟存在抖动,抖动较大时,无法满足建立时间和保持时间的要求,D触发器可能输出错误的数据,产生误码。特别是在高速数字电路中,速率的增加导致建立时间和保持时间的余量越来越小,由于抖动产生误码的概率越来越高,所以,时钟和数据的抖动测试非常重要。
研究串行数据系统的抖动主要是研究时钟与串行数据的相对抖动,而不是单纯的指时钟抖动或者数据抖动。也就是说即使时钟有很大的抖动,但是只要数据也存在同样大的抖动,则两者之间的相对抖动仍旧很小,时钟和数据之间的建立时间和保持时间也仍旧能够得到保证。”
如何将时钟和数据之间的关系联系起来呢? TIE(Time Interval Error)! TIE为作为抖动中最重要的一个参数,我们需要对它有深刻认识。 TIE定义为被测信号边沿与“参考时钟”边沿之间的时间间隔。具体计算中是以和参考电平的交叉点的时刻来计算的,如图3所示。TIE是在信号和参考时钟的每一个边沿都进行测量。
图3 TIE的定义
产生“参考时钟”(也就是前面抖动定义中提到的“理想位置”)有几种方法,比较常用的方法是从被测信号中通过软件PLL进行恢复。有时侯是直接定义一个理想的参考时钟,或者是在外部引入一个硬件时钟作为参考。 PLL的特性是准确测量抖动的关键所在,因为产生的参考时钟的误差将直接影响到TIE的测量结果,并进而影响到最终的抖动测量结果。关于PLL的具体细节请阅读参考文献[2]。
6,峰峰值抖动和总体抖动
峰峰值抖动(pk-pk jitter)是水平线以上的抖动,是直接测量出来的。总体抖动(Tj)是水平线以下的抖动,是通过数学模型预测出来的。很多时候当您说要测量Tj时,我就知道您具体要测量什么了,因为这里面有几个维度是业界的默认设置:Tj通常是指测量10的12次方样本下的数据抖动的TIE抖动的峰峰值抖动(pk-pk jitter)。前面已述,一般都默认了Tj是基于10e-12的误码率的,默认关注的抖动参数是TIE。
7,抖动和眼图的关系
眼图在一定程度上反应了抖动的大小,眼图越“干净”,眼图展开程度越大,说明抖动值越小。眼图的交叉位置在水平轴的区间越小,抖动越小。 在光模块行业,过去常通过眼图交叉点位置形成的余辉直方图来直接测量抖动,余辉直方图的最左到最右边的大小范围即为峰峰值抖动,如图4所示。在HDMI测量规范中对抖动的定义中也是采用这种方法。按前面所述,这是一种水平线以上的抖动。 交叉点的余辉直方图呈现高斯分布,说明抖动的行为主要表现为随机抖动,反之,如果余辉直方图表现为双峰分布,说明有明显的固有抖动。
图4 抖动和眼图的关系
上一篇 : 高速总线测试验证技术-数字示波器
下一篇 : 由数字示波器的方波拐角引发的思考:时域VS频域








